[TOC]
疑惑
Max导出的fbx模型文件加载到客户端,对变换矩阵做了如下的转换,把Z-up右手坐标系的变换矩阵换到Y-up左手坐标系的变换矩阵。咋一看相当懵逼~
FORCEINLINE void _DxMatrixToApexMatrix(physx::PxMat44& matrix, const XMFLOAT4X4& xmMatrix)
{
XMFLOAT4X4 mat = xmMatrix;
std::swap(mat._21, mat._31);
std::swap(mat._22, mat._32);
std::swap(mat._23, mat._33);
std::swap(mat._24, mat._34);
std::swap(mat._12, mat._13);
std::swap(mat._22, mat._23);
std::swap(mat._32, mat._33);
std::swap(mat._42, mat._43);
memcpy((void*)matrix.front(), &mat._11, sizeof(float) * 16);
}
坐标系的不同
-
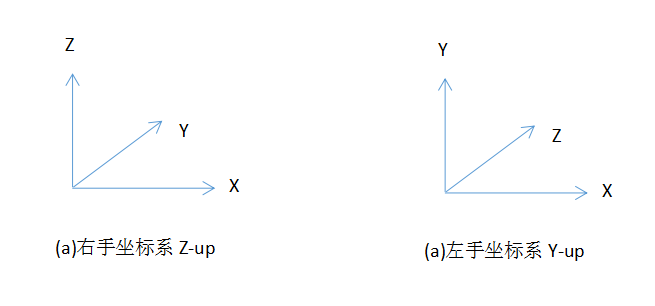
max max里面是Z朝上的右手坐标系,如图(a)所示.
-
DX11 客户端用的DX11是Y轴朝上的左手坐标系,如图(b)所示.
坐标系转换
- 错误的做法
一开始想的是把Y和Z换一下就好了,那么矩阵里面把第二行和第三行换一下不就行了。代码应该是这样:
FORCEINLINE void _DxMatrixToApexMatrix(physx::PxMat44& matrix, const XMFLOAT4X4& xmMatrix)
{
XMFLOAT4X4 mat = xmMatrix;
std::swap(mat._21, mat._31);
std::swap(mat._22, mat._32);
std::swap(mat._23, mat._33);
std::swap(mat._24, mat._34);
memcpy((void*)matrix.front(), &mat._11, sizeof(float) * 16);
}
结果为什么还要换一下第二列和第三列呢? 把Y和Z换一下这个是对的,比如一个向量(x, y, z)变成(x, z, y)。但是,变换矩阵却不能这样操作!我的理解是,矩阵里面有旋转、缩放、平移,针对的是模型上的所有点。只换第二行和第三行是包括了部分缩放和旋转信息,最后对模型上点进行转换的时候都不知道结果是什么。
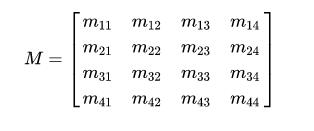
- 验证 假设在Z-up右手坐标系有一个点P$(x, y, z)$,和这个点的变换矩阵:
算一下点P在Z-up右手坐标系变换后的点,和点P1在Y-up左手坐标系变换后的点是不是依旧是同一个点!其中P1=(x, z, y),为P在Y-up坐标系中相同的点,换了一下Y和Z
注意:在Y-up的变换矩阵下P也应该在该坐标系下面,即P1 = (x, z, y)
(1)点P在Z-up右手坐标系变换之后的点为:P*M

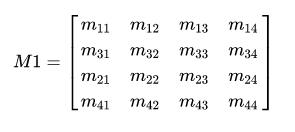
(2)点P在错误的Y-up左手坐标系变换之后的点为:P1*M1

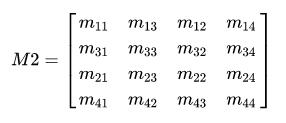
(3)点P在正确的Y-up左手坐标系变换矩阵变换之后的嗲哪位:P1*M2

小结:
(1)可以看到,PM和P1M2的结果换一下Y和Z轴就是一样的,这也说明M2才是正确的变换矩阵!
(2)同时,可以看到P1M1的结果和PM的结果是一样的,这就奇怪了,P1在Y-up左手坐标系用这个矩阵变换后又回到了Z-up右手坐标系里面的坐标(等于没有变换了)
原理
参考[1]中给出了说明,翻译一下如下:
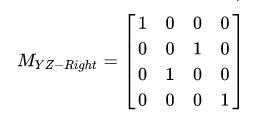
M_YZ右手 = ...// 变换YZ坐标得到在Z-up右手坐标系的点
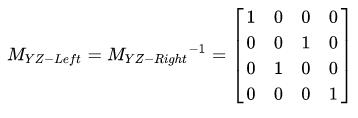
M_YZ左手 = 求逆(M_YZ右手) // 变换YZ坐标重新得到在Y-up左手坐标系的坐标
M右手 = ... // 在Z-up右手坐标系下的一个变换矩阵
M左手 = M_YZ右手 * M右手 * M_YZ左手
简单说明一下:
- 理解上就是不能在不同的坐标系下面矩阵变换。现在是已知在Z-up下面的变换矩阵,求在Y-up下面的变换矩阵。那么就先把点变换到Z-up右手坐标系中,进行矩阵变换,得到点在Z-up右手坐标系新的位置,然后再把这个点换YZ坐标重新得到在Y-up左手坐标系的坐标。
-
M_YZ右手指的是在Z-up右手坐标系里面的把Y和Z换一下,也就是把Z-UP右手坐标系里面的点变换到了Y-up左手坐标系里面的点
- M_YZ左手是相反的操作,其实就是M_YZ右手的逆矩阵,而这里两者是相等的,简单验证就是$M_{YZ-Left} * {M_{YZ-Right}}^{-1}$为单位矩阵
结论
- 数学大法好啊
参考
[1]Changing a matrix from right-handed to left-handed coordinate system